
1. Dane wyjściowe i geometria skrzyżowania
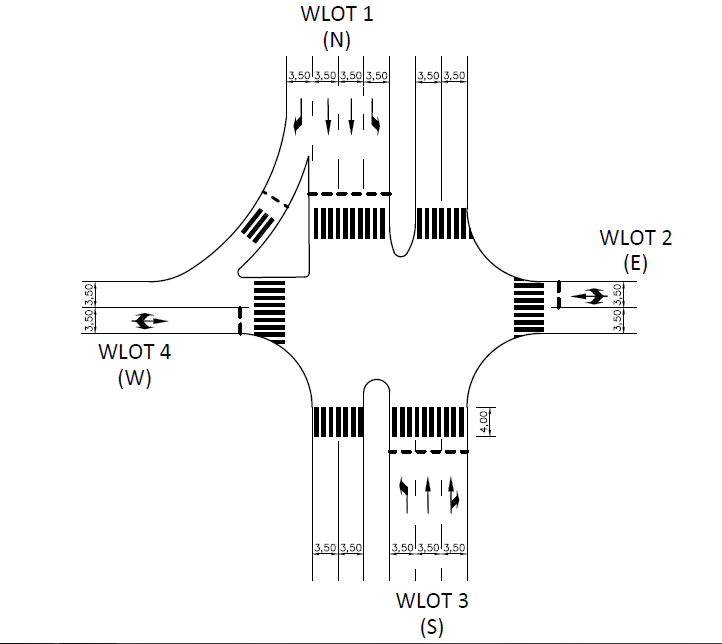
Rys 1. Schemat skrzyżowania
Tabelka 1. Zestawienie danych ruchowych pojazdów
| Ilość pojazdów | Wlot N | Wlot E | Wlot S | Wlot W | ||||||||
| P | W | L | P | W | L | P | W | L | P | W | L | |
| 54 | 456 | 139 | 53 | 233 | 36 | 49 | 472 | 120 | 85 | 229 | 59 | |
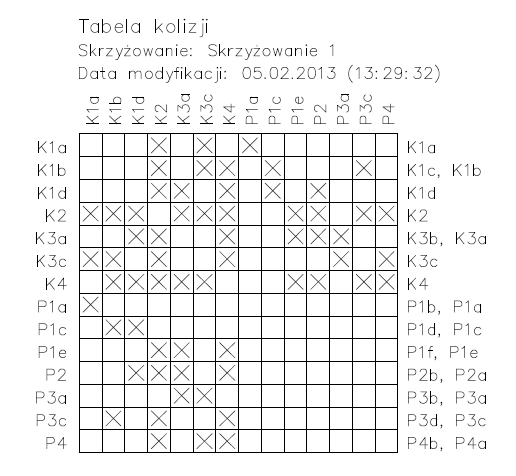
2. Macierzy kolizji obliczona przy pomocy programu GA Sygnalizacja
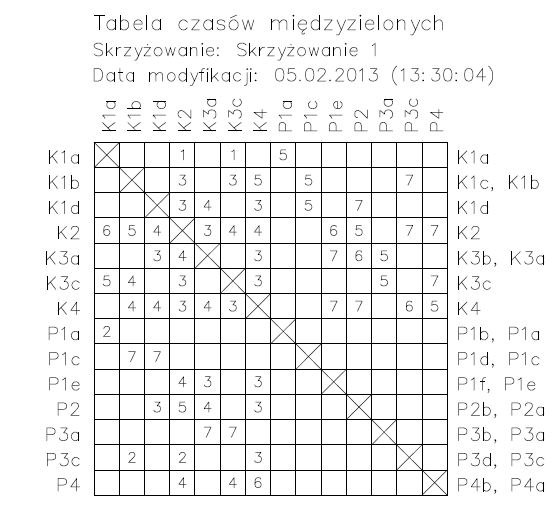
3. Wyznaczona macierz czasów międzyzielonych przy pomocy programu GA Sygnalizacja
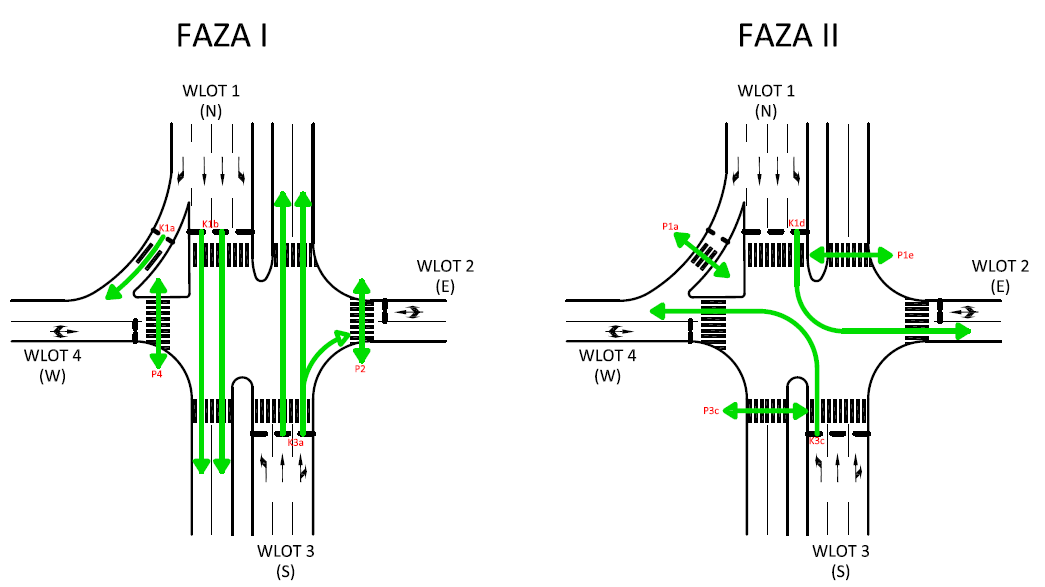
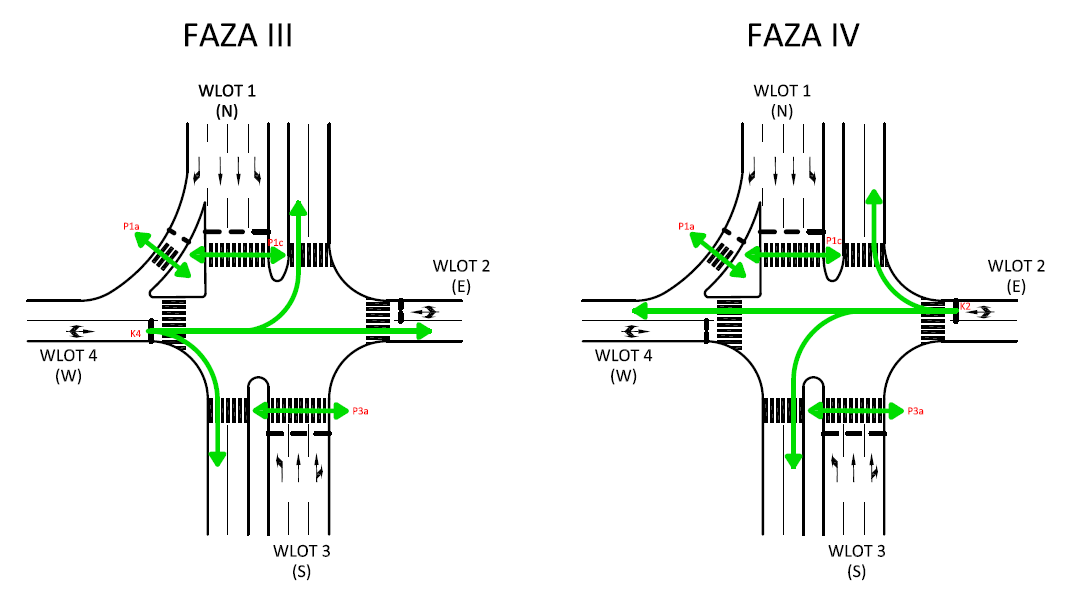
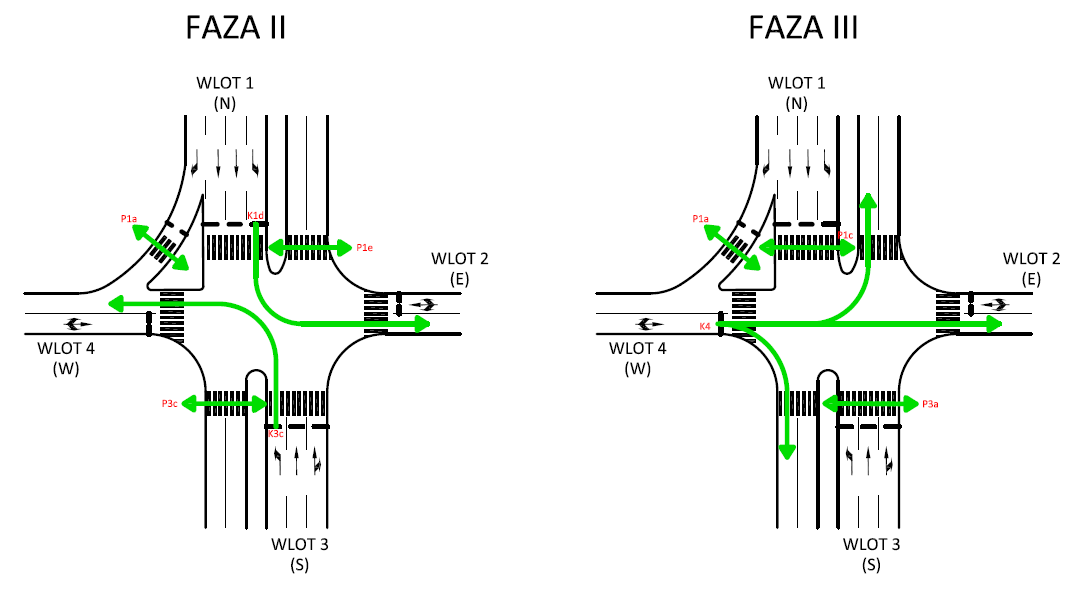
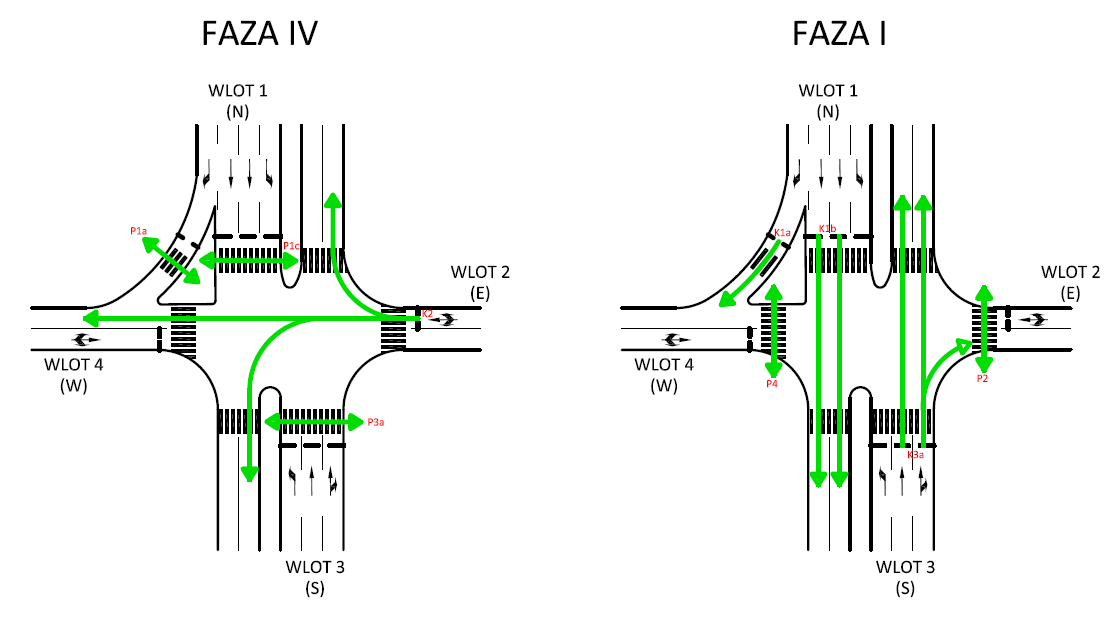
4. Podział programu na 4 fazy
5. Obliczenie czasów traconych pomiędzy fazami
5.1. Czasy międzyzielone między fazą I a II
| Grupa ewakuująca się | Grupa dojeżdżająca | Czas międzyzielony [sekundy] |
| K1a | K3c | 1 |
| K1b | K3c | 2 |
| K3a | K1d | 3 |
| K3b | K1d | 3 |
| Max czas tracony – max tmI | 3 | |
5.2. Czasy międzyzielone między fazą II a III
| Grupa ewakuująca się | Grupa dojeżdżająca | Czas międzyzielony [sekundy] |
| K3c | K4 | 3 |
| K1d | K4 | 3 |
| Max czas tracony – max tmII | 3 | |
5.3. Czasy międzyzielone między fazą III a IV
| Grupa ewakuująca się | Grupa dojeżdżająca | Czas międzyzielony [sekundy] |
| K4 | K2 | 3 |
| Max czas tracony – max tmIII | 3 | |
5.1. Czasy międzyzielone między fazą IV a I
| Grupa ewakuująca się | Grupa dojeżdżająca | Czas międzyzielony [sekundy] |
| K2 | K3a | 3 |
| K2 | K1b | 5 |
| Max czas tracony – max tmIV | 5 | |
Czas tracony w cyklu tS jest sumą maksymalnych czasów międzyzielonych pomiędzy poszczególnymi fazami.
6. Obliczenie natężenia nasycenia
6.1. Relacja na wprost SW
[P/hz]
gdzie:
S0– wyjściowe natężenie nasycenia [E/hz]
– w przypadku relacji bezkolizyjnych na pasie S0= 1900 E/hz
–w przypadku gdy relacja korzysta ze wspólnego pasa z relacją skrętną o kolizyjnym przebiegu w danej fazie sygnalizacyjnej S0=1700 E/hz
w – szerokość pasa ruchu 2,5
δi – wskaźnik kierunku pochylenia ( δi=1 dla wlotu położonego na wzniesieniu[pod górę], δi=0 dla wlotu położonego na spadku [w dół])
i – średnie pochylenie wlotu na odcinku 30 m przed linią zatrzymania [%]
uC – udział pojazdów ciężkich w ruchu [-]
| Wlot | Pas | wp | uc | i | δi | S0 | Sw |
| W1 | 1.2 | 3.50 | 0.09 | 2.0 | 1 | 1900 | 1688 |
| W1 | 1.3 | 3.50 | 0.09 | 2.0 | 1 | 1900 | 1688 |
| W3 | 3.2 | 3.50 | 0.09 | 2.0 | 1 | 1900 | 1688 |
| W3 | 3.3 | 3.50 | 0.09 | 2.0 | 1 | 1700 | 1505 |
| W2 | 2.1 | 3.50 | 0.09 | 2.0 | 1 | 1700 | 1505 |
| W4 | 4.1 | 3.50 | 0.09 | 2.0 | 1 | 1700 | 1505 |
6.2. Bezkolizyjne relacje skrętne w lewo lub w prawo Sr
gdzie:
S0– wyjściowe natężenie nasycenia [E/hz]
– w przypadku relacji bezkolizyjnych na pasie S0= 1900 E/hz
–w przypadku gdy relacja korzysta ze wspólnego pasa z relacją skrętną o kolizyjnym przebiegu w danej fazie sygnalizacyjnej S0=1700 E/hz
w – szerokość pasa ruchu 2,5
δi – wskaźnik kierunku pochylenia ( δi=1 dla wlotu położonego na wzniesieniu[pod górę], δi=0 dla wlotu położonego na spadku [w dół])
δk – wskaźnik położenia pasa ( δk=1 gdy przy chodniku,δk=0 gdy nie jest przy chodniku)
δt – wskaźnik przejazdu przez torowisko ( δt=1 gdy przecina, δt=0 gdy nie przecina)
uC – udział pojazdów ciężkich w ruchu [-]
R – promień skrętu z przedziału 6÷35m. Dla promienie R > 35 m w podanym wzorze należy przyjąć mnożnik równy 1,0
| Wlot | Pas(relacja skrętna) | wp | uc | i | δi | δk | δt | R | S0 | Sw |
| W1 | 1.1 (p) | 3.50 | 0.09 | 2.0 | 1 | 1.0 | 0 | 15.0 | 1900 | 1415 |
| W1 | 1.4 (l) | 3.50 | 0.09 | 2.0 | 1 | 0 | 0 | 15.0 | 1900 | 1549 |
| W3 | 3.1 (l) | 3.50 | 0.09 | 2.0 | 1 | 0 | 0 | 15.0 | 1900 | 1549 |
| W3 | 3.3 (p) | 3.50 | 0.09 | 2.0 | 1 | 1.0 | 0 | 15.0 | 1700 | 1246 |
| W2 | 2.1 (p,l) | 3.50 | 0.09 | 2.0 | 1 | 1.0 | 0 | 15.0 | 1700 | 1246 |
| W4 | 4.1 (p,l) | 3.50 | 0.09 | 2.0 | 1 | 1.0 | 0 | 15.0 | 1700 | 1246 |
7. Sumaryczny stopień nasycenia i stopnie nasycenia dla poszczególnych faz
7.1. Faza I
Wlot 1:
Wlot 3:
dla pasa 3.2 :
dla pasa 3.3 :
7.2. Faza II
Wlot 1:
Wlot 3:
7.3. Faza III
Wlot 4:
7.4. Faza IV
Wlot 2:
7.5. Sumaryczny stopień nasycenia:
8. Wyznaczenie minimalnej i optymalnej długości cyklu ze wzoru Webstera
8.1. Minimalną długość cyklu dla pojazdów:
8.2. Optymalna długość cyklu dla pojazdów:
8.3. Sprawdzenie warunku →
Warunek został spełniony.
9. Przyjęcie długości cyklu
Ostatecznie przyjęto długość cyklu równą 75 sekund
Sprawdzenie warunku →
Warunek został spełniony.
10. Wyznaczenie długości światła zielonego dla poszczególnej fazy:
10.1. Faza I
10.2. Faza II
10.3. Faza III
10.4. Faza IV
11. Sprawdzanie warunku dla pieszych
Minimalną długość sygnału zielonego dla pieszych przy założeniu średniej prędkości pieszych ze wzoru:
ale nie mniejszą niż 4 sekundy światła zielonego i 4 sekundy migającego światła zielonego.
| Grupa sygalizatorów dla danego przejścia | wp [m] | vp [m/s] | Gminp [s] |
| P1a | 4,0 | 1,4 | 3 |
| P1c | 11,0 | 1,4 | 8 |
| P1e | 8,0 | 1,4 | 6 |
| P2 | 8,33 | 1,4 | 6 |
| P3a | 10,5 | 1,4 | 8 |
| P3c | 7,0 | 1,4 | 5 |
| P4 | 9,8 | 1,4 | 7 |
12. Ostateczne przyjęcie długości świateł zielonych dla poszczególnych grup sygnalizacyjnych i stworzenie programu sygnalizacji za pomocą GA Sygnalizacja
Podczas ustalania programu przedstawionego na rysunku poniżej, okazała się możliwa korekta (zwiększenie) długości czasu świateł zielonych na przejściach dla pieszych. W poniższej tabeli przedstawiono czas palenia się światła zielonego dla wszystkich grup sygnalizacyjnych na skrzyżowaniu.
|
Grupa |
Sygnalizatory |
Czas trwania światła zielonego [s] |
Faza |
|
K1a |
K1a |
10 |
I |
|
K1b |
K1b, K1c |
10 |
I |
|
K1d |
K1d |
8 |
II |
|
K2 |
K2 |
20 |
IV |
|
K3a |
K3a, K3b |
10 |
I |
|
K3c |
K3c |
8 |
II |
|
K4 |
K4 |
23 |
III |
|
P1a |
P1a, P1b |
57 + 4 mig. |
II, III, IV |
|
P1c |
P1c, P1d |
47 + 4 mig. |
III, IV |
|
P1e |
P1e, P1f |
6 + 4 mig. |
II |
|
P2 |
P2a, P2b |
7 + 4 mig. |
I |
|
P3a |
P3a, P3b |
47 + 4 mig. |
III, IV |
|
P3c |
P3c, P3d |
6 + 4 mig. |
II |
|
P4 |
P4a, P4b |
7 + 4 mig. |
I |
Program wygenerowany za pomocą programu GA Sygnalizacja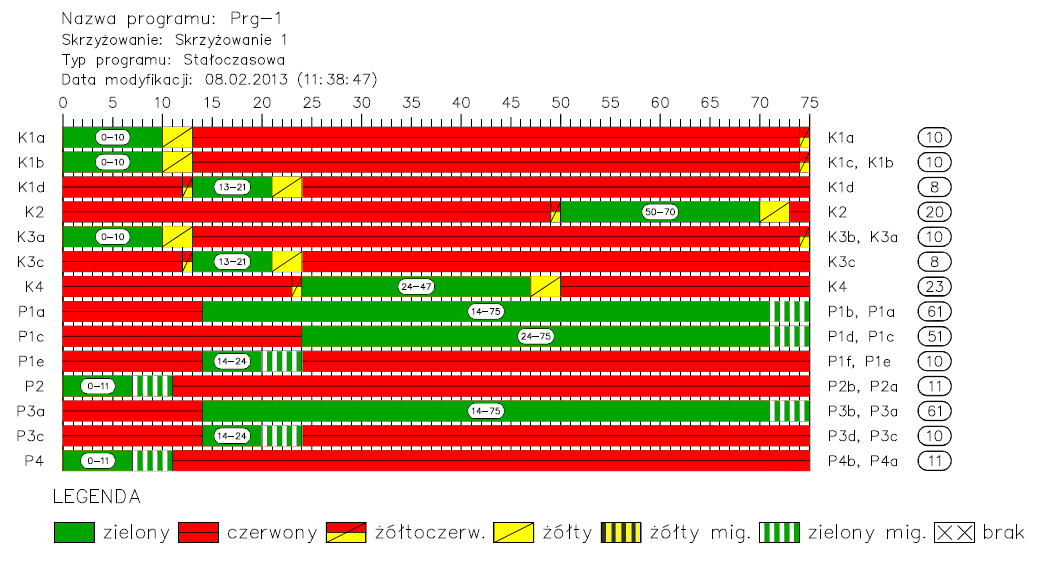
 Oznakowanie pionowe
Oznakowanie pionowe Znaki zakazu
Znaki zakazu Znaki nakazu
Znaki nakazu Znaki informacyjne
Znaki informacyjne Znaki kierunku
Znaki kierunku Znaki uzupełniające
Znaki uzupełniające Tabliczki
Tabliczki Znaki dodatkowe
Znaki dodatkowe Znaki poziome
Znaki poziome Linie krawędziowe
Linie krawędziowe Strzałki
Strzałki Znaki poprzeczne
Znaki poprzeczne Znaki uzupełniające
Znaki uzupełniające Elementy odblaskowe
Elementy odblaskowe Liternictwo
Liternictwo Urządzenia BRD
Urządzenia BRD Obiekty w skrajni drogi
Obiekty w skrajni drogi Ruch pieszych i rowerzystów
Ruch pieszych i rowerzystów Zamykanie drogi dla ruchu
Zamykanie drogi dla ruchu Aktywne urządzenia BRD
Aktywne urządzenia BRD Ograniczanie prędkości
Ograniczanie prędkości Lustra i osłony
Lustra i osłony Prace w pasie drogowym
Prace w pasie drogowym Sygnalizatory wiatru
Sygnalizatory wiatru Sygnalizacja świetlna
Sygnalizacja świetlna Program sygnalizacji
Program sygnalizacji